Acrobot-v1 dqn (466 無料写真)
強化学習】DQNのハイパーパラメータを3つのゲームで比較してみた - Qiita.
Algorithms | Free Full-Text | Iterative Oblique Decision Trees Deliver Explainable RL Models.
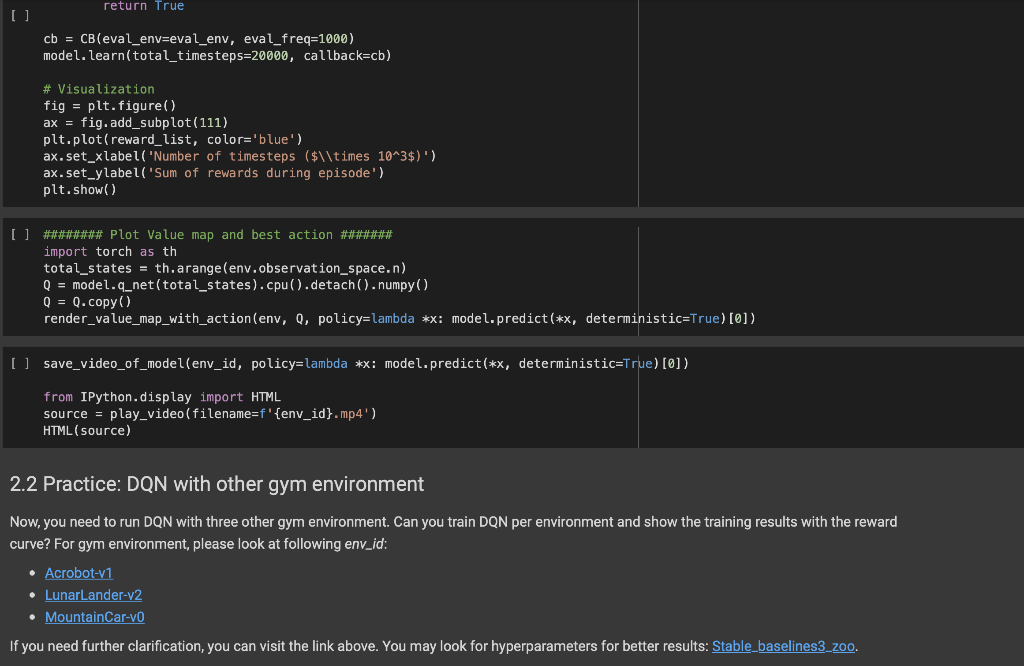
2 Deep Q-learning with Applications [20 pts] In this | Chegg.com.
Acrobot OpenAI Gym | Acrobot Python Tutorial.
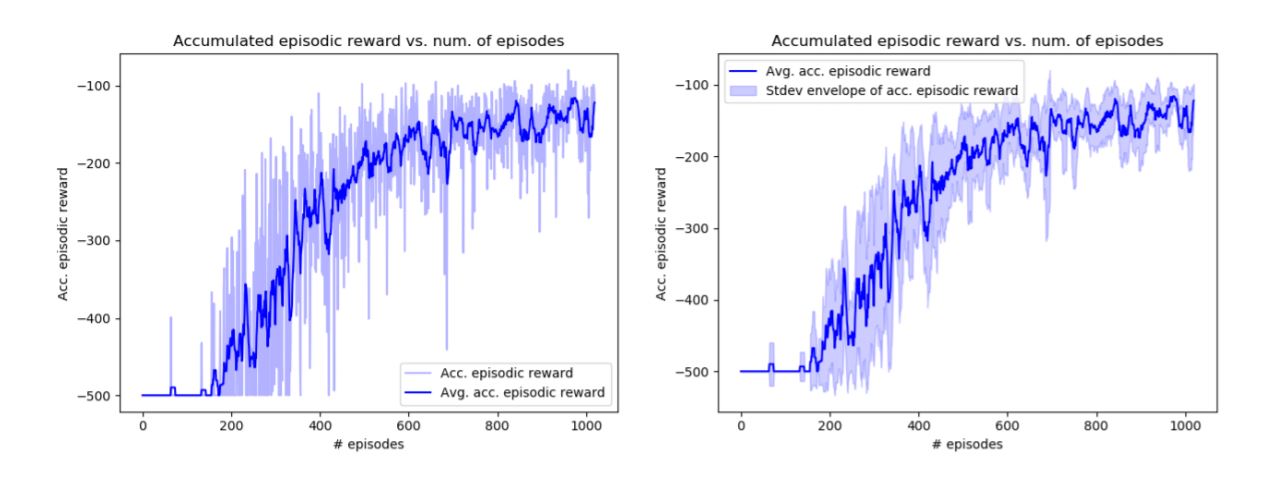
Deep Q-network with Pytorch and Gym to solve the Acrobot game | by Eugenia Anello | Towards Data Science.
Methods for efficient deep reinforcement learning.
Methods for efficient deep reinforcement learning.
통신정보합동학술대회(JCCI'98) 논문 제출 양식.
sb3/dqn-Acrobot-v1 · Hugging Face.
UB Research Poster Template.
Evaluation of deep-RL policies distilled via Variational Abstraction of Markov Decision Processes | Florent Delgrange.
On the presence of Winning Tickets in Reinforcement Learning.
Implementing DQNClipped and DQNReg with Stable Baselines | by AurelianTactics | aureliantactics | Medium.
GitHub - eyalbd2/Deep_RL_Course.
Deep Q-Learning (DQN) - CleanRL.
Reinforcement Learning: Policy Gradient Algorithms | Medium.
FOURIER FEATURES IN REINFORCEMENT LEARNING WITH NEURAL NETWORKS.
Deep Q Network - Acrobot - YouTube.
GitHub - wotmd5731/dqn: pytorch, noisy_distributional_double_dueling_PER_RNN_CNN...CartPole-v1 , Acrobot-v1, MountainCar-v0.
Algorithms | Free Full-Text | Iterative Oblique Decision Trees Deliver Explainable RL Models.
Learn by example Reinforcement Learning with Gym | Kaggle.
Methods for efficient deep reinforcement learning.
Active deep Q-learning with demonstration | SpringerLink.
Prioritized Experience Replay based on Multi-armed Bandit - ScienceDirect.
Fine-tuning Deep Reinforcement Learning Policies with r-STDP for Domain Adaptation.
arXiv:1812.02632v1 [cs.LG] 6 Dec 2018.
Acrobot | What is Acrobot | Acrobot with Deep Q-Learning.
Deep Q-network with Pytorch and Gym to solve the Acrobot game | by Eugenia Anello | Towards Data Science.
Active deep Q-learning with demonstration | SpringerLink.
Deep Q-Learning (DQN) - CleanRL.
Reinforcement Learning with Potential Functions Trained to Discriminate Good and Bad States.
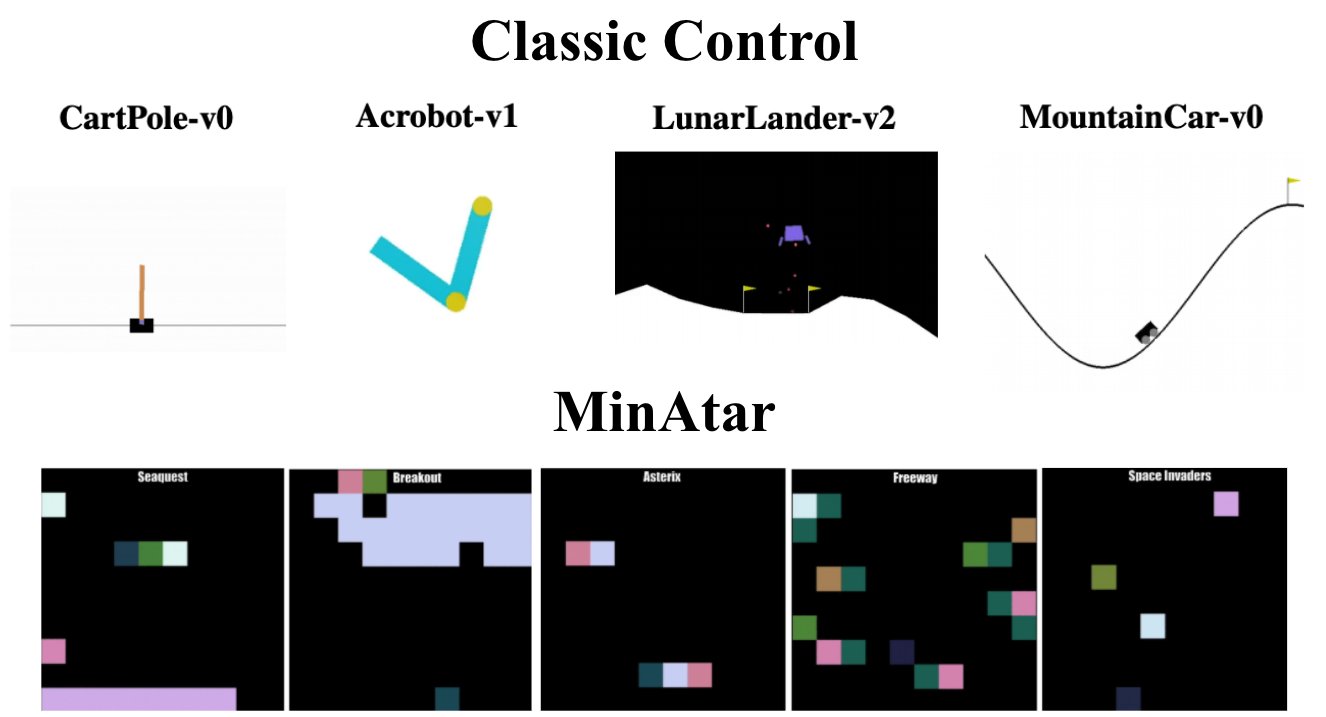
Reinforcement learning framework and toolkits (Gym and Unity) | by Amanda Iglesias Moreno | Towards Data Science.
2 Deep Q-learning with Applications [20 pts] In this | Chegg.com.
iT 邦幫忙::一起幫忙解決難題,拯救IT 人的一天.
強化学習】DQNのハイパーパラメータを3つのゲームで比較してみた - Qiita.
Introduction to Reinforcement Learning. Part 5: Policy Gradient Algorithms.
Pablo Samuel Castro on Twitter: "🔎🌈Revisiting Rainbow🌈🔍 As in original paper, we evaluate the effect of adding various algorithmic components to the original DQN, but run the evaluation on 4 classic control.
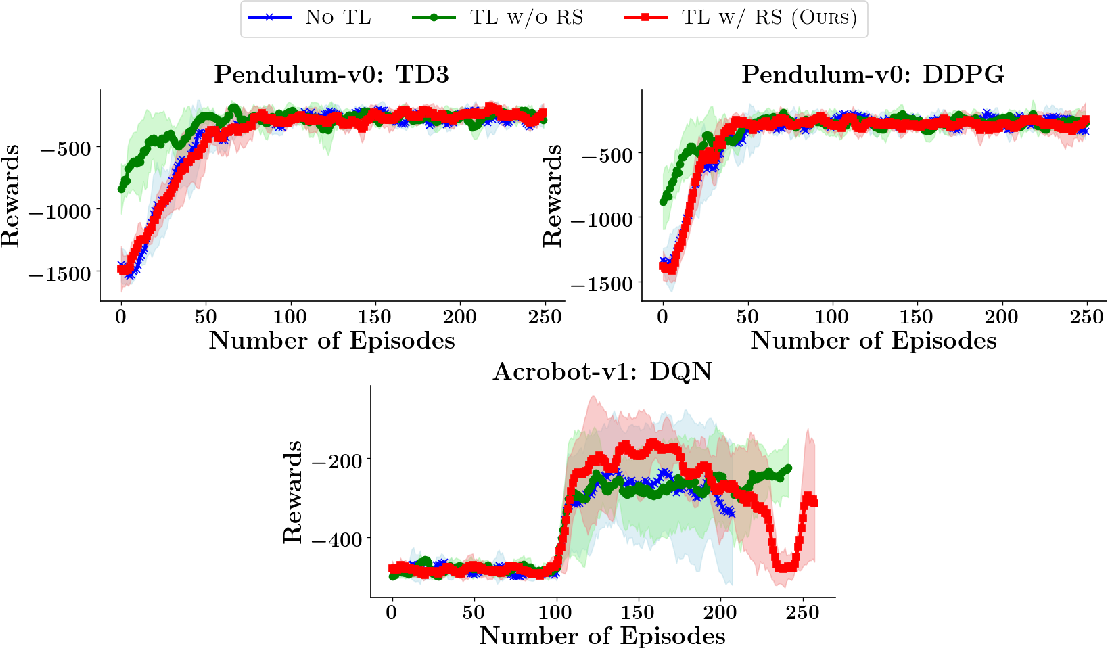
Return curves (a) Acrobot‐v1, (b) MountainCar‐v0, (c) Riverraid‐v0, (d)... | Download Scientific Diagram.
Solved 2 Deep Q-learning with Applications [20 pts] In this | Chegg.com.
以下でより多くの画像をご覧ください:
acrobot-v1 dqn








![arXiv:1803.07482v2 [cs.LG] 13 Nov 2018](https://icaep.com.mx/img/acrobot-v1-dqn.jpg)












![PDF] Transfer Reinforcement Learning for Differing Action](https://icaep.com.mx/img/590891.jpg)





![2 Deep Q-learning with Applications [20 pts] In](https://icaep.com.mx/img/acrobot-v1-dqn-6.png)
![question] Acrobot-v1 DQN ·](https://icaep.com.mx/img/459413.jpg)